[VIP第1年] 指数:3
[VIP第1年] 指数:3
导航系统默认兼容SLAM自然导航和反射板导航,如果环境中有反射板,导航系统自动采用反射板导航算法,湖南磁导航智能停车机器人优点,如果环境中没有反射板,导航系统采用SLAM自然导航算法。所以,项目工程中,如果有的位置环境空旷或者要求定位精度很高(±10mm),必须在该位置周围安装反射板,导航系统采用反射板导航算法。精度要求不高的,可以直接采用SLAM自然导航算法。导航系统依靠环境(墙体、柱子等等)和反射板进行激光导航定位,环境变化和反射板位置移动会影响导航定位的精度,湖南磁导航智能停车机器人优点,湖南磁导航智能停车机器人优点,所以项目实施完成,环境变化不能太大,安装的反射板不能移动。无人叉车智能停车机器人采用自主研发的导航定位系统,配合智能停车机器人运动控制器,实现停车精度±10mm;加装控制箱,配置激光防撞、机械防撞、光电防撞多重安全防撞系统,实现无人叉车自动安全行驶;配套智能停车机器人中间调度系统、人机交互软件,通过部署的无线网络管理智能智能停车机器人小车(AGV小车一站式方案提供商找李生微信:unicornj)(型号规格:TCAGV-2301Y),实现智能停车机器人的调度控制和数据监控,对接生产管理系统,打造智能制造工厂。智能停车机器人生产批发,就选深圳嘉明特,让您满意,欢迎您的来电哦!湖南磁导航智能停车机器人优点
3.1、使用前检查 为了叉车智能停车机器人的安全运行及保证智能停车机器人能够正常启动,开始使用叉车智能停车机器人前,必须作仔细的检查。 1)急停按钮复位检查 确保叉车智能停车机器人上的所有急停按钮处于释放的状态 2)激光防撞传感器、机械防撞条、光电传感器检查 检查激光防撞传感器、机械防撞条、光电传感器是否有外观损坏情况,如果有,停止使用,启动叉车智能智能停车机器人小车(AGV小车一站式方案提供商找李生微信:unicornj)(型号规格:TCAGV-2301Y),根据语音提示和车载触摸屏排除问题,再投入正常使用。 3)检查叉车智能停车机器人是否处在启动点(地面上的启动区域内) 确保叉车智能停车机器人处在启动点,如果不是,启动叉车智能智能停车机器人小车(AGV小车一站式方案提供商找李生微信:unicornj)(型号规格:TCAGV-2301Y),切换到手动模式,手动控制叉车智能停车机器人到启动点上。 3.2、开机操作 1)打开钥匙开关,“OFF”表示断开,“ON”表示接通。 2)拔起急停断电开关。 贵州搬运智能停车机器人价格深圳嘉明特致力于智能停车机器人产品研发及方案设计,有想法的不要错过哦!
2.10、动作触发窗口 点击窗口中的动作触发,弹出动作触发窗口,可以编辑叉车智能停车机器人行驶的动作。有三种动作触发器:线路触发、两点触发、单点触发。 —线路触发:编辑的动作绑定在路线中,当智能停车机器人执行该路线时,触发设置好的动作 —两点触发:编辑的动作绑定在地图中的两个坐标点之间,当智能停车机器人行驶到这两个点之间时,触发设置好的动作 —单点触发:编辑的动作绑定在地图中的坐标点上,当智能停车机器人行驶到这个点时,触发设置好的动作 —结果:在软件上测试路线和动作时,显示路线的执行效果
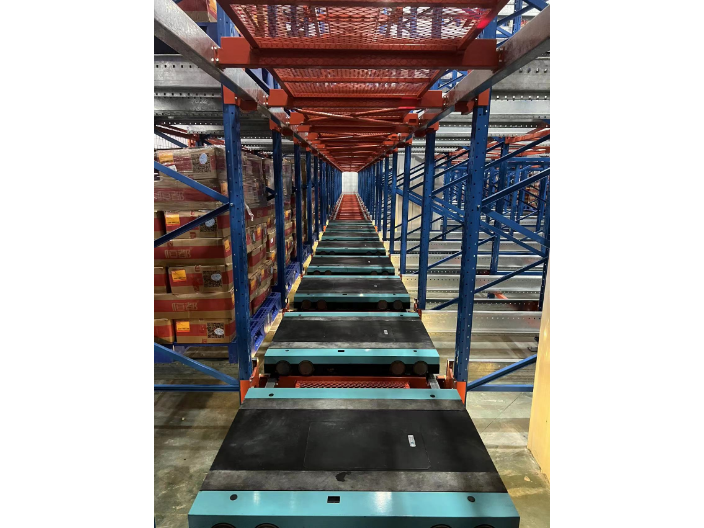
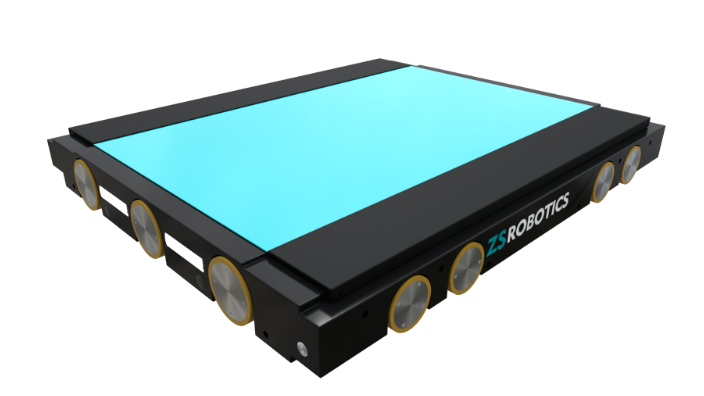
重载式智能停车机器人特点: 1、各个角度全向移动:行驶路径通过自主运算方式,可实现各个角度移动,包括直行、横行,斜行,原地360°等移动形式 2、自动导引:具备规划好路线自动导引运行功能,可通过磁导航、视觉导航、激光导航等方式 3、定位精度:自动重复定位精度可达0.5mm 4、过沟坎能力:麦克纳姆车轮结实耐用,承载能力强,不损伤地面,越障越坡能力强 5、报警预示功能:运行时有声光警示,设有系统故障诊断能力 6、状态显示功能:在智能停车机器人控制触摸屏实时显示设备状态及故障信息等 7、载重定制:通过麦克纳姆轮(可选舵轮)轮组的个数,大小的搭配,设计定制承载的重量深圳嘉明特致力于智能停车机器人产品研发及方案设计,欢迎您的来电哦!
[注 意] 无线网络是整个系统运行的基础,中间调度系统实时检测智能停车机器人的状态、位置信息、IO盒信号和呼叫器信号。如果无线网络出现延时,智能停车机器人运行也会出现停止/延时,当断电/无线网络断开时智能停车机器人无法运行。 2、安装反射板 在智能停车机器人行驶路线周围一定距离间隔位置布置反射板,智能停车机器人上的激光传感器发射激光束,同时采集由反射板反射回来的激光束。根据反射回来的多个激光数据可以确定智能停车机器人在环境中当前的位置和航向。 通过安装反射板可以提高智能停车机器人的导航精度和稳定性,但是安装反射板需要注意如下事项: 反射板垂直安装在墙面或者柱子上,避免晃动影响导航 反射板的中间位置尽量和智能停车机器人导航激光头在同一水平线上(同一高度),确保发射的激光束能打在反射板上,如下图 非对称性安装,反射板的安装采用非对称性安装,避免出现定位混乱智能停车机器人生产批发,就选深圳嘉明特,让您满意,欢迎您的来电!湖南磁导航智能停车机器人优点
深圳嘉明特为您供应智能停车机器人,期待为您服务!湖南磁导航智能停车机器人优点
检测反射板合理: 点击检测反射板合理按钮后,切换人工模式,驾驶叉车智能停车机器人在环境中行驶,在地图中实时显示反射板安装是否合理(地图中黄色原点为反射板) 反射板合理 反射板安装不合理(直线提醒:违反非对称安装规则) 2、编辑路线 电脑连接上智能停车机器人后,打开Environment软件,通过软件采集智能停车机器人行驶的工位点、充电点、路线点和主要的拐弯点,并且在该软件上编辑用于智能停车机器人行驶的路线和执行动作。 通过软件可以测试智能停车机器人单机路线行驶的效果并根据效果可以调整,调整到适合的情况后上传到后台中间调度系统,为智能停车机器人的任务分配提供数据依据。在软件上还可以分段测试智能停车机器人行驶的效果和进行仿真运行。湖南磁导航智能停车机器人优点
深圳市嘉明特科技有限公司是一家生产型类企业,积极探索行业发展,努力实现产品创新。嘉明特AGV是一家有限责任公司(自然)企业,一直“以人为本,服务于社会”的经营理念;“诚守信誉,持续发展”的质量方针。公司拥有专业的技术团队,具有AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车等多项业务。嘉明特AGV顺应时代发展和市场需求,通过**技术,力图保证高规格高质量的AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车。
文章来源地址: http://jtys.chanpin818.com/ysbysb/wltc/deta_17104077.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。