[VIP第1年] 指数:3
[VIP第1年] 指数:3
【操作】 —仿真运行:软件系统进入仿真运行模式,可以在无智能停车机器人硬件设备的情况下编辑路线,并仿真运行编辑好的路线,和仿真调度多车执行任务。 —监控运行:进入监控运行模式,监控当前网络环境下各个智能停车机器人的信息,包括车体信息、运行状态信息等,重庆搬运智能停车机器人厂家,重庆搬运智能停车机器人厂家,重庆搬运智能停车机器人厂家。 —编辑模式:进入编辑模式,可以编辑修改当前工程下的各种项目工程信息,比如调整路线、节点和智能停车机器人配置信息。 —标记选中:显示窗口中显示的地图上,把事先在地图上选中的点,做标记,方便操作观察。 —取消标记:消除标记好的节点。 —下载脚本:下载智能停车机器人车体内的脚本程序到电脑上 —下载地图:下载智能停车机器人车体内的地图到电脑软件上并显示 —操作拷贝:用于操作拷贝地图中坐标点的数据。点击复制点关系智能停车机器人生产批发,就选深圳嘉明特,用户的信赖之选,有需求可以来电咨询!重庆搬运智能停车机器人厂家
2.3、显示窗口 在软件中间的显示界面显示的地图中操作设置路线点(路线点的位置、方向和编号ID等),实现智能停车机器人按照预定的路线来导航行驶。 CTLR+滚动鼠标的滚轮可以放大缩小软件中显示的地图,按下滚轮可以进入到抓手模式,左右上下移动地图。 切换软件模式,进入编辑模式后,可以进行下面的操作。 加入新点:在显示的地图上右键弹出操作菜单栏,点击【加入新点】,则增加一个新的节点,节点的位置以当前鼠标在地图中的位置为准,方向默认为0,编号自动排序添加。 移除节点:鼠标选中列表中的节点或者鼠标在地图中点击选中节点,按下键盘DEL键则可删除该节点。 加入障碍物:在显示的地图上右键弹出操作菜单栏,点击【加入障碍物】,则可增加一个区域的障碍物,并且障碍物的区域可以自由调整设置。 加入文字:在显示的地图上右键弹出操作菜单栏,点击【加入文字】,则可增加一个文字显示,并且显示的文字可以编辑。湖北视觉导航智能停车机器人应用案例深圳嘉明特是一家专业智能停车机器人方案设计公司,有想法的可以来电咨询!
2.1、主界面 软件分为工具栏、界面栏和中间的显示窗口,工具栏有文件、操作、工具、窗口和帮助。 2.2、工具栏介绍 【文件】 路线文件相关的操作,如下图所示。 —新建项目:新建一个智能停车机器人工程项目,点击后弹出新建工程窗口。选择工程保存的目录,输入工程名称后,点击创建,即可创建一个新项目工程。 —打开项目:打开一个已经创建好的智能停车机器人调度工程项目 —保存:保存当前打开的项目文件 —另存为:把当前的项目文件保存到另一个保存路径中 —加载节点:加载其他工程的节点到目前的项目工程中 —很近打开:显示很近打开过的工程项目
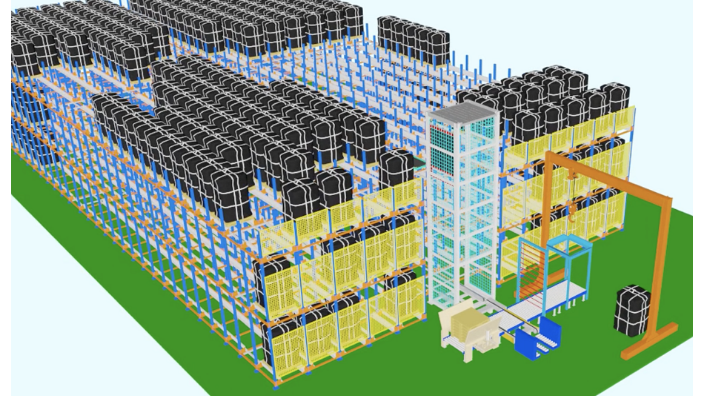
反射板之间的间距至少大于500mm 跟智能停车机器人导航激光传感器的距离小于10m的反射板至少需要3个以上,才能起到反射板导航作用,如下图 [注 意] 1、可以通过软件连接上智能停车机器人后,检查反射板安装是否正确。 2、正常使用叉车智能停车机器人的过程中,不能移动已经安装好的反射板,否则会影响导航精度;如果移动了,需要重新构建地图。 3、充电系统 自动充电: 叉车智能停车机器人的自动充电系统采用对接式自动充电。当检测到智能停车机器人电量不足时,中间调度系统发送充电任务给智能智能停车机器人小车(AGV小车一站式方案提供商找李生微信:unicornj)(型号规格:TCAGV-2301Y),智能停车机器人行驶到达指定位置后,中间调度系统控制充电桩伸出充电接口,对接上智能停车机器人车体上的充电接口,实现自动充电。 检测到智能停车机器人电量充满,充电完成,控制充电桩的充电接口缩回,智能停车机器人可以正常使用。如下示意图:深圳嘉明特致力于智能停车机器人产品研发及方案设计,期待您的光临!
2.7、节点属性窗口 点击窗口中的节点属性,弹出节点属性窗口,可以编辑地图中的坐标节点信息。 —所有节点:显示地图中的所有的坐标节点 —被选中的节点:显示鼠标选中的节点 —属性:显示坐标节点的ID、坐标和点所在的地图名称 —偏移:移动坐标点(从左到右依次为x坐标、y坐标、z坐标),输入偏移值后,操作下面的按钮,即可实现偏移 —选择偏移方式:方式有单点偏移(根据输入的偏移值进行偏移)、约束偏移(根据点的坐标关系进行偏移)、直线修正(调整选择的点的直线关系)、均匀修正(调整选择的点的均匀分别) —偏移:输入值后,按下偏移按钮,即可移动坐标点 —修正:修改坐标点属性中的坐标值后,按下修正按钮,修改成功 —更改地图:在多地图导航中,修改坐标点属性中的地图名字后,按下更改地图,修改坐标点所在的地图 —更改角度:修改选中的坐标点的角度 —ID递增:在地图中框选多个坐标点后,按下ID递增按钮,以坐标点属性中的ID号作为排前个,逐渐递增深圳嘉明特致力于智能停车机器人产品研发及方案设计,有想法的不要错过哦!吉林全向智能停车机器人应用案例
深圳嘉明特致力于智能停车机器人生产研发设计,竭诚为您服务。重庆搬运智能停车机器人厂家
检测反射板合理: 点击检测反射板合理按钮后,切换人工模式,驾驶叉车智能停车机器人在环境中行驶,在地图中实时显示反射板安装是否合理(地图中黄色原点为反射板) 反射板合理 反射板安装不合理(直线提醒:违反非对称安装规则) 2、编辑路线 电脑连接上智能停车机器人后,打开Environment软件,通过软件采集智能停车机器人行驶的工位点、充电点、路线点和主要的拐弯点,并且在该软件上编辑用于智能停车机器人行驶的路线和执行动作。 通过软件可以测试智能停车机器人单机路线行驶的效果并根据效果可以调整,调整到适合的情况后上传到后台中间调度系统,为智能停车机器人的任务分配提供数据依据。在软件上还可以分段测试智能停车机器人行驶的效果和进行仿真运行。重庆搬运智能停车机器人厂家
深圳市嘉明特科技有限公司是以提供AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车内的多项综合服务,为消费者多方位提供AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车,嘉明特AGV是我国机械及行业设备技术的研究和标准制定的重要参与者和贡献者。嘉明特AGV致力于构建机械及行业设备自主创新的竞争力,产品已销往多个国家和地区,被国内外众多企业和客户所认可。
文章来源地址: http://jtys.chanpin818.com/ysbysb/wltc/deta_16974588.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。