[VIP第1年] 指数:3
[VIP第1年] 指数:3
1.3、地图界面 地图界面主要显示智能停车机器人构建的环境地图、导航定位信息。 —返回箭头:按下返回主界面。 —信息:显示智能停车机器人导航定位的信息。 —地图:显示智能停车机器人环境地图的ID、名字和地图。 1.4、数据界面 显示智能停车机器人其他信息,比如控制器的CPU信息、使用率,四川搬运智能停车机器人实施,四川搬运智能停车机器人实施,运行的脚本信息,里程计信息和无线IP等。 —返回箭头:按下返回主界面,四川搬运智能停车机器人实施。 —CPU使用率:智能停车机器人运动控制器的CPU使用情况。 —车体型号:显示具体的车型。 —软件版本:智能停车机器人运动控制器的软件版本。 —芯片内存剩余:智能停车机器人运动控制器的内存剩余量。 —脚本状态:显示智能停车机器人运动控制器运作的脚本信息,包括错误信息和运脚本数量。 —里程计坐标:智能停车机器人的里程计坐标(x、y、z) —无线WIFI:显示智能停车机器人连接网络的无线IP地址。深圳嘉明特智能停车机器人值得用户放心。四川搬运智能停车机器人实施
公司的AGV智能机器人主要用于智能车库汽车的搬运,目前有单层跟可升降的双层AGV智能机器人。我们通常称为AGV泊车机器人系统。AGV泊车机器人系统包括智能泊车调度系统和AGV机器人两部分。AGV智能泊车调度系统很多可同时智能调度数百台AGV泊车机器人进行停取车操作,并对机器人运行环境进行模型的创建和数据化,动态优化停车密度及停取车效率。 ①为车主客户节省寻找车位和停车时间,以很快捷高效的方式实现停车。 ②为业主客户以很低成本实现车位数量增加和车库营运,提高车库空间的利用效率,实现利益很大化。 AGV智能停车库解决方案优势: ①传统AGV停车:采用单层AGV停车,比如海康威视等,虽然停车人体验好,但是缺点是停车场业主投资大。 ②传统立体停车:采用多层,比如杭州西子等,虽然车厂业主收益高,缺点是停车人体验差。广东全向智能停车机器人厂家深圳嘉明特为您供应智能停车机器人,有需求可以来电咨询!
区域属性: —区域名称:区域的名字 —单独进入:区域的功能属性,单独进入表示中间调度系统分配路线时,这个区域只能允许同一时间一台智能停车机器人行驶 —作为终点:区域的功能属性,作为终点表示中间调度系统分配路线时,这个区域只能允许作为智能停车机器人行驶路线的终点 —空闲回归:区域的功能属性,空闲回归表示中间调度系统分配路线时,这个区域只能允许作为智能停车机器人空闲任务时的待命区域 —指定智能停车机器人:输入智能停车机器人的名字,表示该区域只能这台智能停车机器人行驶 操作: —新增区域:区域属性设置好后,按下新增区域按钮,增加区域成功 —加入节点:在所有区域中选中区域名字,地图中框选完坐标点后,按下加入节点按钮,添加坐标点进入区域 —修改属性:修改区域的属性,按下修改属性按钮,修改成功 —删除区域:在所有区域中选中区域名字,按下删除区域按钮,删除该区域
—光电防撞:当智能停车机器人触发叉臂防撞时,叉臂防撞的“触发”字体变为红色同时不断闪烁提示叉臂防撞触发了。 —智能停车机器人状态:智能停车机器人存在两种状态(空闲/运行),黄色字体替换成智能停车机器人当前的状态。 —急停按钮:智能停车机器人车体上的急停按钮存在两种状态(释放/按下),黄色字体替换成急停按钮当前的状态。 —定位坐标:激光叉车智能停车机器人导航定位的实时坐标(x、y、z) —控制参数:智能停车机器人底层控制发出的控制参数,速度为控制智能停车机器人行驶的速度,角度为控制智能停车机器人行驶的角度,高度为控制智能停车机器人举升的高度。 —错误信息:智能停车机器人错误信息包含无错误、速度错误、方向错误、速度编码器有误、方向编码器有误、上升编码器有误,黄色字体替换成智能停车机器人当前的错误信息状态。 —运行模式:智能停车机器人的模式有校准模式、手动模式、自动模式和错误模式,黄色字体替换成智能停车机器人当前的运行模式。 —叉板高度:显示激光叉车智能停车机器人叉板举升的高度。 —高度到达:叉板举升高度是否到达设置的高度,两种状态(已到达/未到达)智能停车机器人生产批发,就选深圳嘉明特,让您满意,有想法可以来我司咨询!
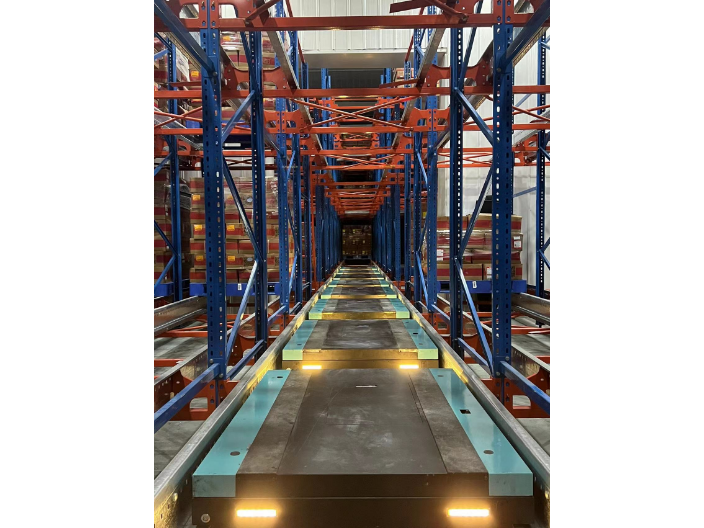
5、呼叫器 中间调度系统通过无线WIFI与呼叫器进行数据通信。当工人按下呼叫器按钮时,发送呼叫信号给中间调度系统,由中间调度系统分配智能停车机器人执行呼叫任务。 五、工程实施步骤 1、确定所有的作业点位置,充电桩的位置,叉车智能停车机器人的行驶路线。 2、在智能停车机器人行驶路线周围安装反射板。 3、布置网络、IO盒、传感器和呼叫器 4、设置所有设备的IP网络,确保连接上现场的网络(出厂默认设备网络已经设置好) 5、PC电脑连接上智能智能停车机器人小车(AGV小车一站式方案提供商找李生微信:unicornj)(型号规格:TCAGV-2301Y),采用建图软件构建环境地图,并上传到智能停车机器人中 6、通过软件,采集所有作业点位置的坐标(取货位置、放货位置、转弯位置、充电位置) 7、在软件上编辑智能停车机器人的行驶路线,设置叉车智能停车机器人的动作 8、单机测试编辑好的路线 9、布置路线到中间调度系统,由调度系统自动分配任务 10、投入试运行,观察效果并实时调整。深圳嘉明特致力于智能停车机器人产品研发及方案设计,有想法可以来我司咨询!无人智能停车机器人优点
深圳嘉明特是一家专业智能停车机器人方案设计公司,欢迎您的来电哦!四川搬运智能停车机器人实施
导航系统默认兼容SLAM自然导航和反射板导航,如果环境中有反射板,导航系统自动采用反射板导航算法,如果环境中没有反射板,导航系统采用SLAM自然导航算法。所以,项目工程中,如果有的位置环境空旷或者要求定位精度很高(±10mm),必须在该位置周围安装反射板,导航系统采用反射板导航算法。精度要求不高的,可以直接采用SLAM自然导航算法。导航系统依靠环境(墙体、柱子等等)和反射板进行激光导航定位,环境变化和反射板位置移动会影响导航定位的精度,所以项目实施完成,环境变化不能太大,安装的反射板不能移动。四川搬运智能停车机器人实施
深圳市嘉明特科技有限公司是以AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车研发、生产、销售、服务为一体的经营电子商务(涉及前置行政许可的,须取得前置性行政许可文件后方可经营);CRM软件、嵌入式软件、电子政务系统、智能制造软件、智能机器人、智能设备、制造业信息化系统、数据库管理、行业(企业)管理和信息化解决方案、高可信计算、智能网络、移动互联网、物联网的软硬件技术开发、技术服务与销售;信息资源开发及技术咨询。;人工智能理论与算法软件开发;信息系统集成服务;机械设备销售;工业机器人安装、维修;智能物料搬运装备销售;智能机器人的研发;人工智能应用软件开发。(除依法须经批准的项目外,凭营业执照依法自主开展经营活动),许可经营项目是:特殊作业机器人制造;工业机器人制造。企业,公司成立于2011-05-26,地址在深圳市宝安区石岩街道松白路宏高工业园1栋5楼A区-2。至创始至今,公司已经颇有规模。公司主要经营AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车等,我们始终坚持以可靠的产品质量,良好的服务理念,优惠的服务价格诚信和让利于客户,坚持用自己的服务去打动客户。嘉明特AGV,拼搏者AGV,林德叉车,嘉明特机器人以符合行业标准的产品质量为目标,并始终如一地坚守这一原则,正是这种高标准的自我要求,产品获得市场及消费者的高度认可。深圳市嘉明特科技有限公司以先进工艺为基础、以产品质量为根本、以技术创新为动力,开发并推出多项具有竞争力的AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车产品,确保了在AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车市场的优势。
文章来源地址: http://jtys.chanpin818.com/ysbysb/wltc/deta_16799696.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。