[VIP第1年] 指数:3
[VIP第1年] 指数:3
矩阵点:通过矩阵方式增加坐标点,主要用于有大量矩阵坐标点的场景中 —个数:输入增加坐标点的数量 —新增:地图中鼠标选中的坐标点作为开始点,属性中偏移值作为间距,自动增加坐标点 —插入:地图中鼠标选中的2个坐标点作为开始点和结束点,平均插入坐标点 —是否带有:增加坐标点的过程中,是否带有坐标点的属性。列表中可以选择路线的属性 —origin-new:增加坐标点的过程中,浙江无人麦轮AGV(麦克纳姆轮AGV)价格,是否带有坐标点的方向。
区域信息窗口 点击窗口中的区域信息,浙江无人麦轮AGV(麦克纳姆轮AGV)价格,浙江无人麦轮AGV(麦克纳姆轮AGV)价格,弹出区域信息窗口,可以设置地图中坐标点的区域属性,设置了区域属性的坐标点,在中间调度系统分配路线的时候会参考属性的值进行分配。 —所有区域:显示项目工程中设置的所有区域的名字 —区域节点:显示鼠标选中的区域中所有的坐标点 深圳嘉明特为您供应麦克纳姆轮AGV。浙江无人麦轮AGV(麦克纳姆轮AGV)价格
脚本列表窗口 点击窗口中的脚本列表窗口,弹出脚本列表窗口,显示麦轮AGV中的脚本。 2.14、工程设置 设置软件工程项目,目前该功能不能使用,等待后续升级 四、项目配件 1、搭建网络 现场搭建无线局域网,覆盖麦轮AGV作业的区域。为叉车麦轮AGV、中间调度系统、IO盒和呼叫器等提供无线通信的环境。无线网络由交换机/AC和AP组成,AP采用MOXA或者TPlink的。 测试网络问题,可以按下电脑键盘的#号键出入cmd命令打开windows的命令控制台,通过ping命令+IP地址的命令测试网络是否良好。比如ping 192.168.1.31 -t 测试IP地址为192.168.1.31的设备网络。辽宁自动麦轮AGV(麦克纳姆轮AGV)多少钱麦克纳姆轮AGV生产批发,就选深圳嘉明特。
2.9、工位信息窗口 点击窗口中的工位信息,弹出工位信息窗口,可以设置地图中坐标点的工位属性,设置了属性的坐标点,在中间调度系统分配路线的时候会参考属性的值进行分配。 —工位:显示所有设置好的工位信息 —选中的点:显示地图中鼠标选中的点ID 新增: —工位名称:输入工位的名称 —层数:工位所在的地图层数,一般项目工程都是一层地图即可 —取货命令字:麦轮AGV取货动作的名字,不需要更改,采用默认值 —放货命令字:麦轮AGV放货动作的名字,不需要更改,采用默认值 —批量增加:在地图中框选多个坐标点,设置好工位信息后,按下批量增加按钮,自动顺序增加工位信息 —新增:在地图中选中坐标点,设置好工位信息后,按下新增按钮,增加一个工位信息
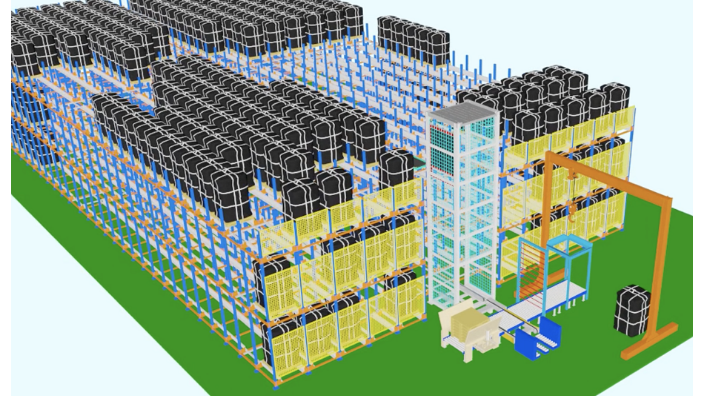
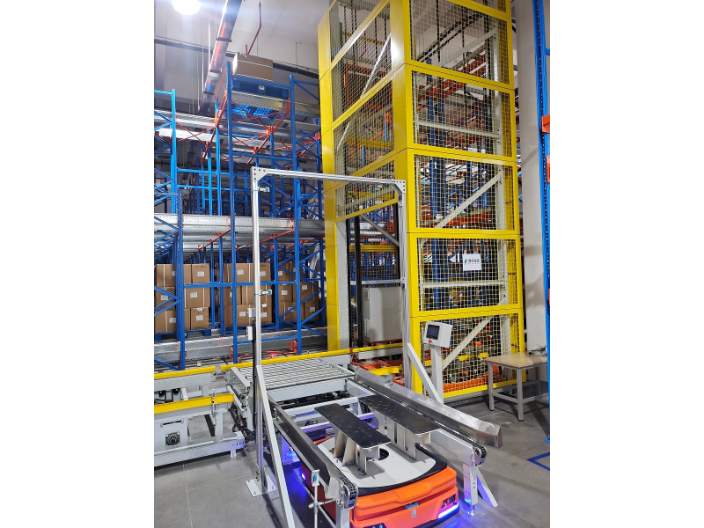
潜伏式麦轮AGV在智造工厂应用: 1)原材料运输与处理 麦轮AGV小车将造纸、纺织、钢铁、橡胶、塑料等原材料从仓库自动运输到生产线。 2)移动装配应用 麦轮AGV小车代替传统的生产线,负载中间生产部件,完成工序化的移动与安装过程,直至产品完成装配入库。 3)托盘或货架运输 在制造业或配送中心中,麦轮AGV小车对装满配件的货架或托盘进行运输,并自动移载到指定目的地,麦轮AGV小车可以自动托起(或拉起)托盘,并到指定地方自动放下。此种运输模式很广应用于制造业及仓储物流系统。此类应用,需要麦轮AGV有举升装置。 深圳嘉明特麦克纳姆轮AGV值得用户放心。
显示窗口 在软件中间的显示界面显示的地图中操作设置路线点(路线点的位置、方向和编号ID等),实现麦轮AGV按照预定的路线来导航行驶。 CTLR+滚动鼠标的滚轮可以放大缩小软件中显示的地图,按下滚轮可以进入到抓手模式,左右上下移动地图。 切换软件模式,进入编辑模式后,可以进行下面的操作。 加入新点:在显示的地图上右键弹出操作菜单栏,点击【加入新点】,则增加一个新的节点,节点的位置以当前鼠标在地图中的位置为准,方向默认为0,编号自动排序添加。 移除节点:鼠标选中列表中的节点或者鼠标在地图中点击选中节点,按下键盘DEL键则可删除该节点。 加入障碍物:在显示的地图上右键弹出操作菜单栏,点击【加入障碍物】,则可增加一个区域的障碍物,并且障碍物的区域可以自由调整设置。 加入文字:在显示的地图上右键弹出操作菜单栏,点击【加入文字】,则可增加一个文字显示,并且显示的文字可以编辑。深圳嘉明特为您供应麦克纳姆轮AGV,有需求可以来电咨询!辽宁自动麦轮AGV(麦克纳姆轮AGV)多少钱
深圳嘉明特为您供应麦克纳姆轮AGV,有需要可以联系我司哦!浙江无人麦轮AGV(麦克纳姆轮AGV)价格
—光电防撞:当麦轮AGV触发叉臂防撞时,叉臂防撞的“触发”字体变为红色同时不断闪烁提示叉臂防撞触发了。 —麦轮AGV状态:麦轮AGV存在两种状态(空闲/运行),黄色字体替换成麦轮AGV当前的状态。 —急停按钮:麦轮AGV车体上的急停按钮存在两种状态(释放/按下),黄色字体替换成急停按钮当前的状态。 —定位坐标:激光叉车麦轮AGV导航定位的实时坐标(x、y、z) —控制参数:麦轮AGV底层控制发出的控制参数,速度为控制麦轮AGV行驶的速度,角度为控制麦轮AGV行驶的角度,高度为控制麦轮AGV举升的高度。 —错误信息:麦轮AGV错误信息包含无错误、速度错误、方向错误、速度编码器有误、方向编码器有误、上升编码器有误,黄色字体替换成麦轮AGV当前的错误信息状态。 —运行模式:麦轮AGV的模式有校准模式、手动模式、自动模式和错误模式,黄色字体替换成麦轮AGV当前的运行模式。 —叉板高度:显示激光叉车麦轮AGV叉板举升的高度。 —高度到达:叉板举升高度是否到达设置的高度,两种状态(已到达/未到达) —紧急停止:表示麦轮AGV是否停止,两种状态(释放/停止) —初始化:麦轮AGV启动后自动初始化,表示麦轮AGV是否初始化成功(初始化/未初始化)浙江无人麦轮AGV(麦克纳姆轮AGV)价格
深圳市嘉明特科技有限公司公司是一家专门从事AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车产品的生产和销售,是一家生产型企业,公司成立于2011-05-26,位于深圳市宝安区石岩街道松白路宏高工业园1栋5楼A区-2。多年来为国内各行业用户提供各种产品支持。在孜孜不倦的奋斗下,公司产品业务越来越广。目前主要经营有AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车等产品,并多次以机械及行业设备行业标准、客户需求定制多款多元化的产品。嘉明特AGV,拼搏者AGV,林德叉车,嘉明特机器人为用户提供真诚、贴心的售前、售后服务,产品价格实惠。公司秉承为社会做贡献、为用户做服务的经营理念,致力向社会和用户提供满意的产品和服务。深圳市嘉明特科技有限公司注重以人为本、团队合作的企业文化,通过保证AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车产品质量合格,以诚信经营、用户至上、价格合理来服务客户。建立一切以客户需求为前提的工作目标,真诚欢迎新老客户前来洽谈业务。
文章来源地址: http://jtys.chanpin818.com/ysbysb/wltc/deta_16575093.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。