[VIP第1年] 指数:3
[VIP第1年] 指数:3
—区域信息:编辑地图的区域信息。 —工位信息:设置地图的工位点信息。 —动作触发:设置舵轮AGV的运行动作的窗口,可以配置舵轮AGV在地图中任意节点上执行任意的动作。 —数据库:设置连接数据库的配置参数窗口,通过该窗口可以设置连接后台数据库的参数和查看连接状态信息,北京视觉导航舵轮AGV实施。 —地图属性:地图信息窗口,通过窗口可以查看地图的基本属性,修改调整等。 —脚本列表:显示舵轮AGV车体所有的脚本程序 —工程设置:设置工程项目的配置。 【帮助】 关于该软件系统的信息介绍,北京视觉导航舵轮AGV实施,软件本版,生产厂家等信息,北京视觉导航舵轮AGV实施。深圳嘉明特致力于舵轮AGV产品研发及方案设计,期待您的光临!北京视觉导航舵轮AGV实施
1 手动操纵手柄 舵轮AGV处于手动模式下,通过操纵手柄控制叉车舵轮AGV行驶,升降 2 仪表 车体自带的仪表盘 3 后机罩总成 4 激光防撞传感器 在舵轮AGV运行过程中,用于检测舵轮AGV运行方向一定范围内的障碍物,并进行声光报警提示,同时舵轮AGV减速或停止避让,当障碍物移开后舵轮AGV自动恢复运行(长时间避障停止,需要人工按下释放按钮,才能恢复继续运行) 5 自动充电接口 用于和自动充电桩对接,实现自动充电 6 承载轮 7 货叉 8 车架 9 钥匙开关 控制整车电源的开关 10 急停断电开关 按下,关闭控制箱和车体电源,叉车舵轮AGV无法被控制 11 蓄电池罩 打开蓄电池罩,可以看到里面的电池。当需要手动充电时,需要打开蓄电池罩,详情查看本手册手动充电操作一节。 12 急停按钮 通过“手按”等简单的操作,即可实现舵轮AGV紧急停止的功能。紧急停车后,操作人员解决完毕异常状况,释放急停按钮,表示舵轮AGV的故障已解除,按下复位按钮,舵轮AGV才能启动继续运行。 13 电源/复位按钮 电源/复位按钮,叉车具备自动充电,充电完成自动开机。所以电源按钮失效,该按钮只有复位按钮功能。湖北自主舵轮AGV排名深圳嘉明特为您供应舵轮AGV,有需要可以联系我司哦!
2.9、工位信息窗口 点击窗口中的工位信息,弹出工位信息窗口,可以设置地图中坐标点的工位属性,设置了属性的坐标点,在中间调度系统分配路线的时候会参考属性的值进行分配。 —工位:显示所有设置好的工位信息 —选中的点:显示地图中鼠标选中的点ID 新增: —工位名称:输入工位的名称 —层数:工位所在的地图层数,一般项目工程都是一层地图即可 —取货命令字:舵轮AGV取货动作的名字,不需要更改,采用默认值 —放货命令字:舵轮AGV放货动作的名字,不需要更改,采用默认值 —批量增加:在地图中框选多个坐标点,设置好工位信息后,按下批量增加按钮,自动顺序增加工位信息 —新增:在地图中选中坐标点,设置好工位信息后,按下新增按钮,增加一个工位信息
[注 意] 无线网络是整个系统运行的基础,中间调度系统实时检测舵轮AGV的状态、位置信息、IO盒信号和呼叫器信号。如果无线网络出现延时,舵轮AGV运行也会出现停止/延时,当断电/无线网络断开时舵轮AGV无法运行。 2、安装反射板 在舵轮AGV行驶路线周围一定距离间隔位置布置反射板,舵轮AGV上的激光传感器发射激光束,同时采集由反射板反射回来的激光束。根据反射回来的多个激光数据可以确定舵轮AGV在环境中当前的位置和航向。 通过安装反射板可以提高舵轮AGV的导航精度和稳定性,但是安装反射板需要注意如下事项: 反射板垂直安装在墙面或者柱子上,避免晃动影响导航 反射板的中间位置尽量和舵轮AGV导航激光头在同一水平线上(同一高度),确保发射的激光束能打在反射板上,如下图 非对称性安装,反射板的安装采用非对称性安装,避免出现定位混乱深圳嘉明特是一家专业舵轮AGV方案设计公司。
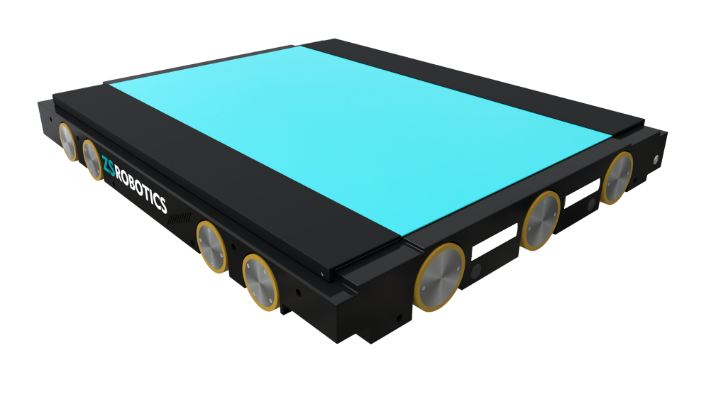
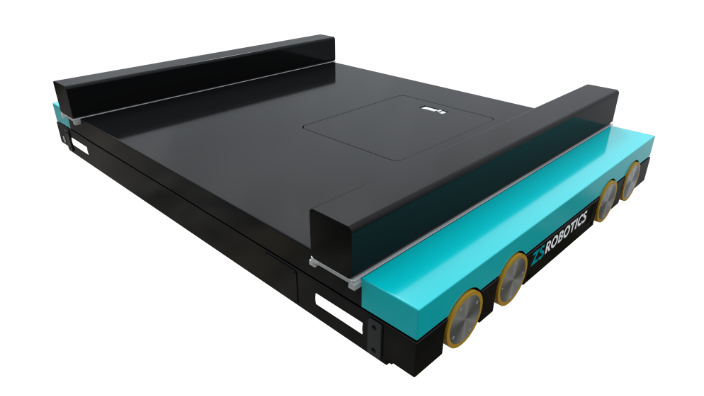
货箱到人机器人,货箱到人麦克纳姆AGV小车(型号规格:JMT-SL2209X),采用的导航方式是二维码+IMU,负载为250kg,驱动形式是双轮差速驱动,采用的叉取方式:旋转夹抱式,货箱到人机器人自带料箱取放工具,配合外面自动化拣选系统,可实现全自动无人化拣选搬运。支持前进、后退、原地旋转,速度可达1.5m/s。支持窄巷道双向作业和高度提升功能,充分利用空间,提高库容率。多料箱准确存储搬运,减少无效跑动,提高效率。配备前/后激光避障、碰撞条、急停按钮、声音告警等多重安全防护。配置触摸屏,可实时显示机器人工作状态及任务信息;支持手动控制各执行机构,交互友好。可很广应用于电商、电子制造、机械制造、纺织、草行业,医药等行业的仓储、物流搬运等应用场景。舵轮AGV生产批发,就选深圳嘉明特,用户的信赖之选,欢迎新老客户来电!湖北自主舵轮AGV排名
深圳嘉明特为您供应舵轮AGV。北京视觉导航舵轮AGV实施
三、编辑软件 1、构建地图 电脑连接上舵轮AGV后,打开BuildMap软件,通过软件和舵轮AGV小车构建环境地图,并上传到舵轮AGV小车内。 1.1、主界面 软件分为工具栏、和中间的显示窗口,工具栏有File、设置、操作、工具、窗口和帮助。 —File:软件文件的操作,包括新建、打开、保存和另存为 —设置:设置软件的建图参数、定位参数等,软件参数采用默认参数即可,不需要更改 —操作:开始构建地图和保存地图等操作 —工具:获取坐标和标尺工具 —窗口:切换地图、建图窗口、定位信息等,一般项目的建图不需要操作 —帮助:关于该软件系统的信息介绍,软件本版,生产厂家等信息。北京视觉导航舵轮AGV实施
深圳市嘉明特科技有限公司是一家集生产科研、加工、销售为一体的****,公司成立于2011-05-26,位于深圳市宝安区石岩街道松白路宏高工业园1栋5楼A区-2。公司诚实守信,真诚为客户提供服务。公司主要经营AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车等产品,我们依托高素质的技术人员和销售队伍,本着诚信经营、理解客户需求为经营原则,公司通过良好的信誉和周到的售前、售后服务,赢得用户的信赖和支持。公司秉承以人为本,科技创新,市场先导,和谐共赢的理念,建立一支由AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车**组成的顾问团队,由经验丰富的技术人员组成的研发和应用团队。嘉明特AGV,拼搏者AGV,林德叉车,嘉明特机器人秉承着诚信服务、产品求新的经营原则,对于员工素质有严格的把控和要求,为AGV小车,激光叉车,潜伏顶升AGV,非标AGV小车行业用户提供完善的售前和售后服务。
文章来源地址: http://jtys.chanpin818.com/ysbysb/wltc/deta_16265676.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。