[VIP第1年] 指数:3
[VIP第1年] 指数:3
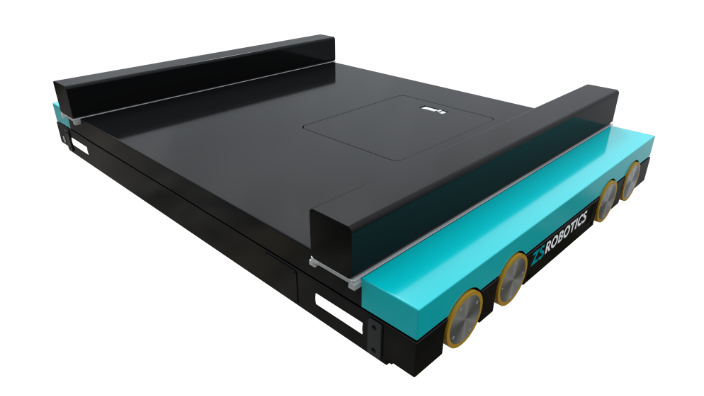
1 手动操纵手柄 AGV处于手动模式下,扬州自主AGV小车排名,通过操纵手柄控制叉车AGV行驶,升降 2 仪表 车体自带的仪表盘 3 后机罩总成 4 激光防撞传感器 在AGV运行过程中,用于检测AGV运行方向一定范围内的障碍物,并进行声光报警提示,同时AGV减速或停止避让,当障碍物移开后AGV自动恢复运行(长时间避障停止,需要人工按下释放按钮,才能恢复继续运行) 5 自动充电接口 用于和自动充电桩对接,实现自动充电 6 承载轮 7 货叉 8 车架 9 钥匙开关 控制整车电源的开关 10 急停断电开关 按下,关闭控制箱和车体电源,扬州自主AGV小车排名,叉车AGV无法被控制 11 蓄电池罩 打开蓄电池罩,可以看到里面的电池。当需要手动充电时,需要打开蓄电池罩,详情查看本手册手动充电操作一节。 12 急停按钮 通过“手按”等简单的操作,即可实现AGV紧急停止的功能。紧急停车后,操作人员解决完毕异常状况,扬州自主AGV小车排名,释放急停按钮,表示AGV的故障已解除,按下复位按钮,AGV才能启动继续运行。 13 电源/复位按钮 电源/复位按钮,叉车具备自动充电,充电完成自动开机。所以电源按钮失效,该按钮只有复位按钮功能。AGV小车生产批发,就选深圳嘉明特,用户的信赖之选,有想法可以来我司咨询!扬州自主AGV小车排名
光电防撞传感器的维护保养 叉车AGV叉子上的光电防撞传感器,每隔一个月采用软布擦除表面的灰尘,避免堆积的灰尘触发光电防撞,影响激光叉车AGV的正常行驶
锂电池的维护保养 叉车AGV长期不使用,需要每隔一段时间对叉车AGV手动充电,避免锂电池的损坏。
叉车AGV整体维护检查 每隔一段时间,检查整个叉车AGV的性能情况(导航定位、激光防撞、机械防撞、叉子上的光电防撞、举升高度信息、各种按钮等),通过车载显示屏上的状态信息来检查,如果发现异常,处理完成后再使用。 南京自主AGV小车哪家强深圳嘉明特是一家专业AGV小车方案设计公司,期待您的光临!
调度系统
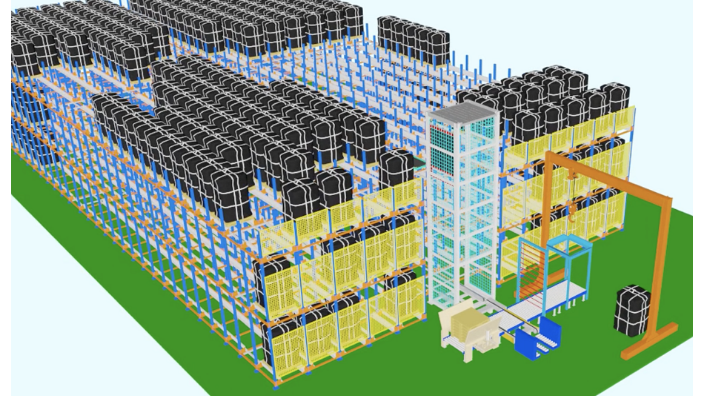
调度系统作为机器人作业系统的大脑,通过无线网络汇总所有节点的数据信息,包括叉车AGV、AMR、呼叫按钮、PAD、MES/WMS系统、产线传感器等。根据汇总信息,实现任务分配,多车协同搬运工作、数据可视化监控和生产任务管理。使生产过程全自动,无需人工干预,实现真正的无人化作业。
对机器人的电量进行检测,低电量时报警或自动充电,充电时间可设置;
基于机器人的车辆管理、交通状态和运输任务指令,实现高效的运输流优化;
基于机器人的车辆分配、交通管制和协调避让,实现高效的运输流优化;
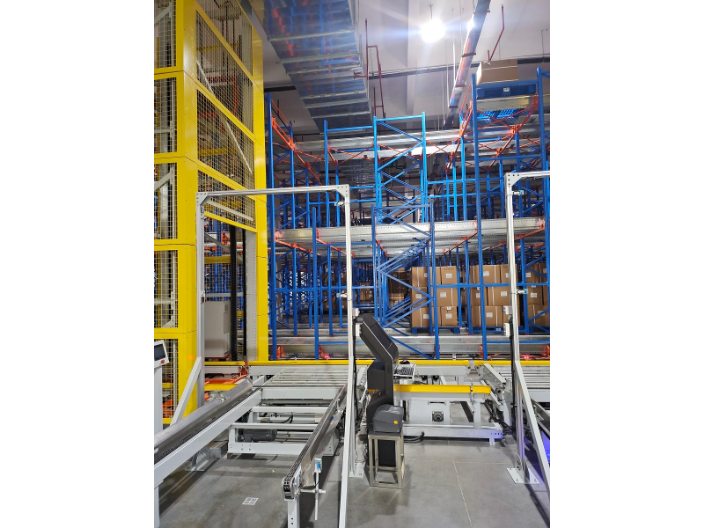
可根据仓库规划,自动实现货物的搬运、整齐摆放、出入库等;
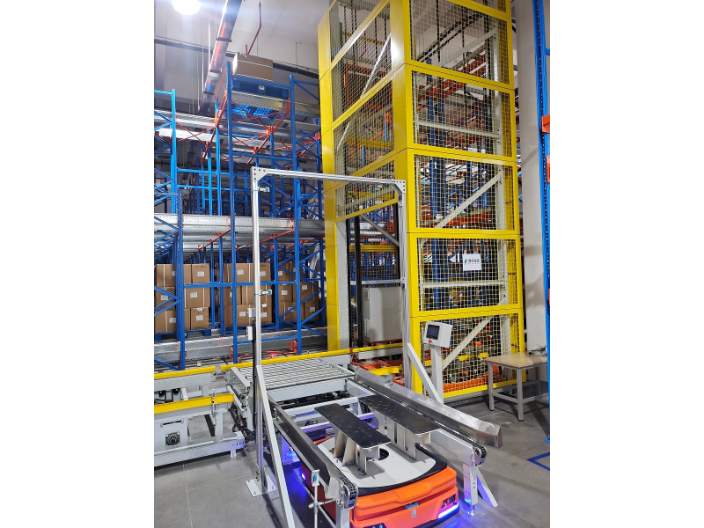
可与立体库管理系统进行对接,实现自动出入库;
数据可视化监控,监控显示整个系统的信息(机器人状态信息、行驶路线、任务信息、仓库货物信息)
数据记录,保存以往的作业任务,故障信息。
接口丰富,可对接各种物料管理系统,仓储管理系统。如MES,WMS,ERP等。可对接各种现场IO传感器信号,如物料到位信号等,各种自动门开关,电梯出入等等
机器人属性分配,针对多楼层大区域作业场景,可由客户自己设置分配机器人的作业情况,包括任务执行时间、出库、入库、回流、其他特殊的任务。
导航系统默认兼容SLAM自然导航和反射板导航,如果环境中有反射板,导航系统自动采用反射板导航算法,如果环境中没有反射板,导航系统采用SLAM自然导航算法。所以,项目工程中,如果有的位置环境空旷或者要求定位精度很高(±10mm),必须在该位置周围安装反射板,导航系统采用反射板导航算法。精度要求不高的,可以直接采用SLAM自然导航算法。导航系统依靠环境(墙体、柱子等等)和反射板进行激光导航定位,环境变化和反射板位置移动会影响导航定位的精度,所以项目实施完成,环境变化不能太大,安装的反射板不能移动。深圳嘉明特为您供应AGV小车,有想法的不要错过哦!
显示窗口 在软件中间的显示界面显示的地图中操作设置路线点(路线点的位置、方向和编号ID等),实现AGV按照预定的路线来导航行驶。 CTLR+滚动鼠标的滚轮可以放大缩小软件中显示的地图,按下滚轮可以进入到抓手模式,左右上下移动地图。 切换软件模式,进入编辑模式后,可以进行下面的操作。 加入新点:在显示的地图上右键弹出操作菜单栏,点击【加入新点】,则增加一个新的节点,节点的位置以当前鼠标在地图中的位置为准,方向默认为0,编号自动排序添加。 移除节点:鼠标选中列表中的节点或者鼠标在地图中点击选中节点,按下键盘DEL键则可删除该节点。 加入障碍物:在显示的地图上右键弹出操作菜单栏,点击【加入障碍物】,则可增加一个区域的障碍物,并且障碍物的区域可以自由调整设置。 加入文字:在显示的地图上右键弹出操作菜单栏,点击【加入文字】,则可增加一个文字显示,并且显示的文字可以编辑。AGV小车生产批发,就选深圳嘉明特,用户的信赖之选,有想法的不要错过哦!贵阳无人AGV小车官网
AGV小车生产批发,就选深圳嘉明特,让您满意,欢迎您的来电哦!扬州自主AGV小车排名
检测反射板合理: 点击检测反射板合理按钮后,切换人工模式,驾驶叉车AGV在环境中行驶,在地图中实时显示反射板安装是否合理(地图中黄色原点为反射板) 反射板合理 反射板安装不合理(直线提醒:违反非对称安装规则) 编辑路线 电脑连接上AGV后,打开Environment软件,通过软件采集AGV行驶的工位点、充电点、路线点和主要的拐弯点,并且在该软件上编辑用于AGV行驶的路线和执行动作。 通过软件可以测试AGV单机路线行驶的效果并根据效果可以调整,调整到适合的情况后上传到后台中枢调度系统,为AGV的任务分配提供数据依据。在软件上还可以分段测试AGV行驶的效果和进行仿真运行。扬州自主AGV小车排名
深圳市嘉明特科技有限公司是一家有着雄厚实力背景、信誉可靠、励精图治、展望未来、有梦想有目标,有组织有体系的公司,坚持于带领员工在未来的道路上大放光明,携手共画蓝图,在广东省等地区的机械及行业设备行业中积累了大批忠诚的客户粉丝源,也收获了良好的用户口碑,为公司的发展奠定的良好的行业基础,也希望未来公司能成为*****,努力为行业领域的发展奉献出自己的一份力量,我们相信精益求精的工作态度和不断的完善创新理念以及自强不息,斗志昂扬的的企业精神将**深圳市嘉明特科技供应和您一起携手步入辉煌,共创佳绩,一直以来,公司贯彻执行科学管理、创新发展、诚实守信的方针,员工精诚努力,协同奋取,以品质、服务来赢得市场,我们一直在路上!
文章来源地址: http://jtys.chanpin818.com/ysbysb/wltc/deta_15329707.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。